Las capacidades de conducción autónoma del rover se pondrán a prueba este mes cuando comience una serie de sprints sin precedentes hasta su próxima ubicación de muestreo.
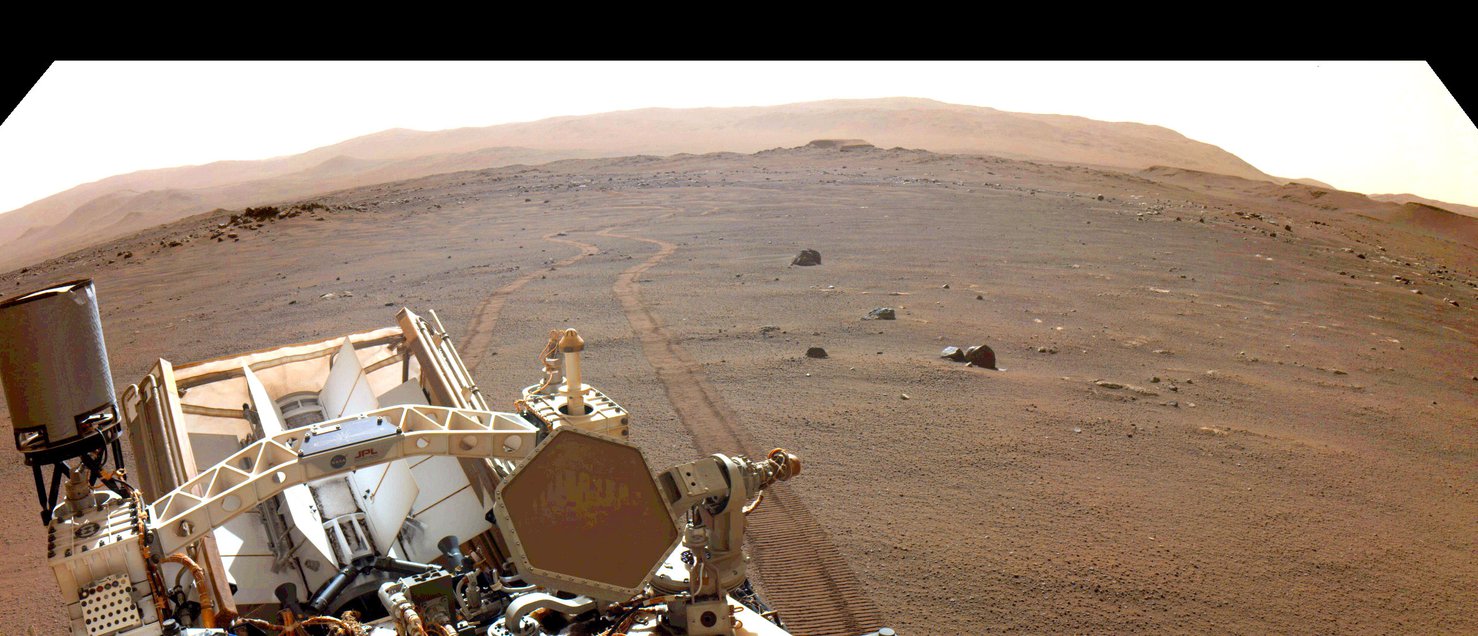
El rover Perseverance Mars de la NASA está tratando de cubrir más distancia en un solo mes que cualquier rover anterior, y lo está haciendo utilizando inteligencia artificial. En el camino por delante hay pozos de arena, cráteres y campos de rocas afiladas por los que el rover tendrá que navegar solo. Al final del viaje de 5 kilómetros (3 millas), que comenzó el 14 de marzo de 2022, Perseverance llegará a un antiguo delta de un río dentro del cráter Jezero, donde existió un lago hace miles de millones de años.
Este delta es una de las mejores ubicaciones en Marte para que el rover busque signos de vida microscópica pasada. Usando un taladro en el extremo de su brazo robótico y un complejo sistema de recolección de muestras en su vientre, Perseverance está recolectando núcleos de roca para ser enviados a la Tierra, la primera parte de la campaña Mars Sample Return.
“El delta es tan importante que en realidad hemos decidido minimizar las actividades científicas y concentrarnos en conducir para llegar más rápido”, dijo Ken Farley de Caltech, científico del proyecto de Perseverance. “Tomaremos muchas imágenes del delta durante ese viaje. Cuanto más nos acerquemos, más impresionantes serán esas imágenes”.
El equipo científico buscará en estas imágenes las rocas que eventualmente querrán estudiar en más detalle usando los instrumentos en el brazo de Perseverance. También buscarán las mejores rutas que el rover pueda tomar para ascender el delta de 40 metros (130 pies) de altura.
Pero primero, el Perseverance debe llegar allí. El rover hará esto confiando en su sistema automático AutoNav, que ya ha establecido impresionantes récords de distancia. Si bien todos los rovers de Marte de la NASA han tenido capacidades de conducción autónoma, Perseverance tiene la más avanzada hasta el momento.
“Los procesos autónomos que tardan minutos en un rover como el Opportunity tardan menos de un segundo en el Perseverance”, dijo el veterano planificador de rover y desarrollador de software de vuelo Mark Maimone del Laboratorio de Propulsión a Chorro de la NASA en el sur de California, que lidera la misión. “Debido a que la conducción autónoma ahora es más rápida, podemos cubrir más terreno que si los humanos programaran cada conducción”.
Cómo funciona la planificación móvil
Antes de que el rover ruede, un equipo de expertos en planificación de movilidad (Perseverance tiene 14 que intercambian turnos) escribe los comandos de conducción que llevará a cabo el explorador robótico. Los comandos llegan a Marte a través de la Red de Espacio Profundo de la NASA y Perseverance envía datos para que los planificadores puedan confirmar el progreso del rover. Se requieren varios días para completar algunos planes, como con un recorrido reciente que abarcó aproximadamente 510 metros (1,673 pies) e incluyó miles de comandos móviles individuales.
Algunas unidades requieren más intervención humana que otras. AutoNav es útil para conducir sobre terreno llano con peligros potenciales simples, por ejemplo, grandes rocas y pendientes, que son fáciles de detectar y sortear para el móvil.
Pensar mientras se conduce
AutoNav refleja una evolución de las herramientas de conducción autónoma desarrolladas previamente para los rovers Spirit, Opportunity y Curiosity de la NASA. Lo que es diferente para AutoNav es “pensar mientras conduce”, lo que permite que Perseverance tome y procese imágenes mientras está en movimiento. Luego, el rover navega en función de esas imágenes. ¿Está esa roca demasiado cerca? ¿Podrá su barriga pasar por encima de esa roca? ¿Qué pasaría si las ruedas del rover patinaran?
El hardware actualizado permite “pensar mientras se conduce”. Las cámaras más rápidas significan que Perseverance puede tomar imágenes lo suficientemente rápido como para procesar su ruta en tiempo real. Y a diferencia de sus predecesores, Perseverance tiene una computadora adicional dedicada por completo al procesamiento de imágenes. La computadora se basa en un microchip súper eficiente de un solo propósito llamado matriz de puerta programable en campo que es excelente para el procesamiento de visión por computadora.
“En los rovers anteriores, la autonomía significaba ralentizarse porque los datos tenían que procesarse en una sola computadora”, dijo Maimone. “Esta computadora adicional es increíblemente rápida en comparación con lo que teníamos en el pasado, y tenerla dedicada para conducir significa que no tiene que compartir recursos informáticos con más de 100 otras tareas”.
Por supuesto, los humanos no están completamente fuera de escena durante los viajes en AutoNav. Todavía planifican la ruta básica utilizando imágenes tomadas desde el espacio por misiones como Mars Reconnaissance Orbiter de la NASA. Luego, marcan obstáculos como posibles trampas de arena para que Perseverance los evite, dibujando zonas de “mantener fuera” y “mantener adentro” que lo ayudan a navegar.
Otra gran diferencia es el sentido del espacio de Perseverance.
El programa de navegación autónoma de Curiosity mantiene al rover en una burbuja de seguridad de 16 pies (5 metros) de ancho. Si Curiosity detecta dos rocas que están, por ejemplo, a 15 pies (4,5 metros) de distancia, un espacio por el que podría pasar fácilmente, igual se detendrá o las rodeará en lugar de correr el riesgo de atravesarlas.
Pero la burbuja de Perseverance es mucho más pequeña: una caja virtual está centrada en cada una de las seis ruedas del rover. El rover más nuevo de Marte tiene una comprensión más sensible del terreno y puede sortear rocas por sí solo.
“Cuando vimos por primera vez el cráter Jezero como lugar de aterrizaje, nos preocupaban los densos campos de rocas que vimos esparcidos por el suelo del cráter”, dijo Maimone. “Ahora podemos bordear o incluso pasar por encima de rocas a las que no podríamos habernos acercado antes”.
Mientras que las misiones anteriores del rover llevaban un ritmo más lento explorando a lo largo de su camino, AutoNav brinda al equipo científico la capacidad de desplazarse a los lugares que más priorizan. Eso significa que la misión está más enfocada en su objetivo principal: encontrar las muestras que los científicos eventualmente querrán devolver a la Tierra.
Más sobre la misión
Un objetivo clave para la misión de Perseverance en Marte es la astrobiología, incluida la búsqueda de signos de vida microbiana antigua. El rover caracterizará la geología del planeta y el clima pasado, allanará el camino para la exploración humana del Planeta Rojo y será la primera misión en recolectar y almacenar rocas y regolito (roca rota y polvo) marcianos.
Las misiones posteriores de la NASA, en cooperación con la ESA (Agencia Espacial Europea), enviarían naves espaciales a Marte para recolectar estas muestras selladas de la superficie y devolverlas a la Tierra para un análisis en profundidad.
La misión Mars 2020 Perseverance es parte del enfoque de exploración de la Luna a Marte de la NASA, que incluye misiones Artemis a la Luna que ayudarán a prepararse para la exploración humana del Planeta Rojo.
JPL, que Caltech administra para la NASA en Pasadena, California, construyó y administra las operaciones del rover Perseverance.
Para más información en Inglés sobre el Perseverance: mars.nasa.gov/mars2020/ y nasa.gov/perseverance
Traducción no oficial con fines divulgativos del artículo original en Inglés
Créditos: NASA / JPL-Caltech