El brazo robótico es fundamental para realizar las tareas del módulo central de la estación espacial Tianhe durante el período de la misión Shenzhou-12 de China.
La misión Shenzhou-12 de China ha llevado a tres astronautas a unirse a la estación espacial Tiangong. Servirán como el primer equipo de construcción y realizarán caminatas espaciales para dar los toques finales al exterior de la estación y realizar algunas decoraciones interiores.
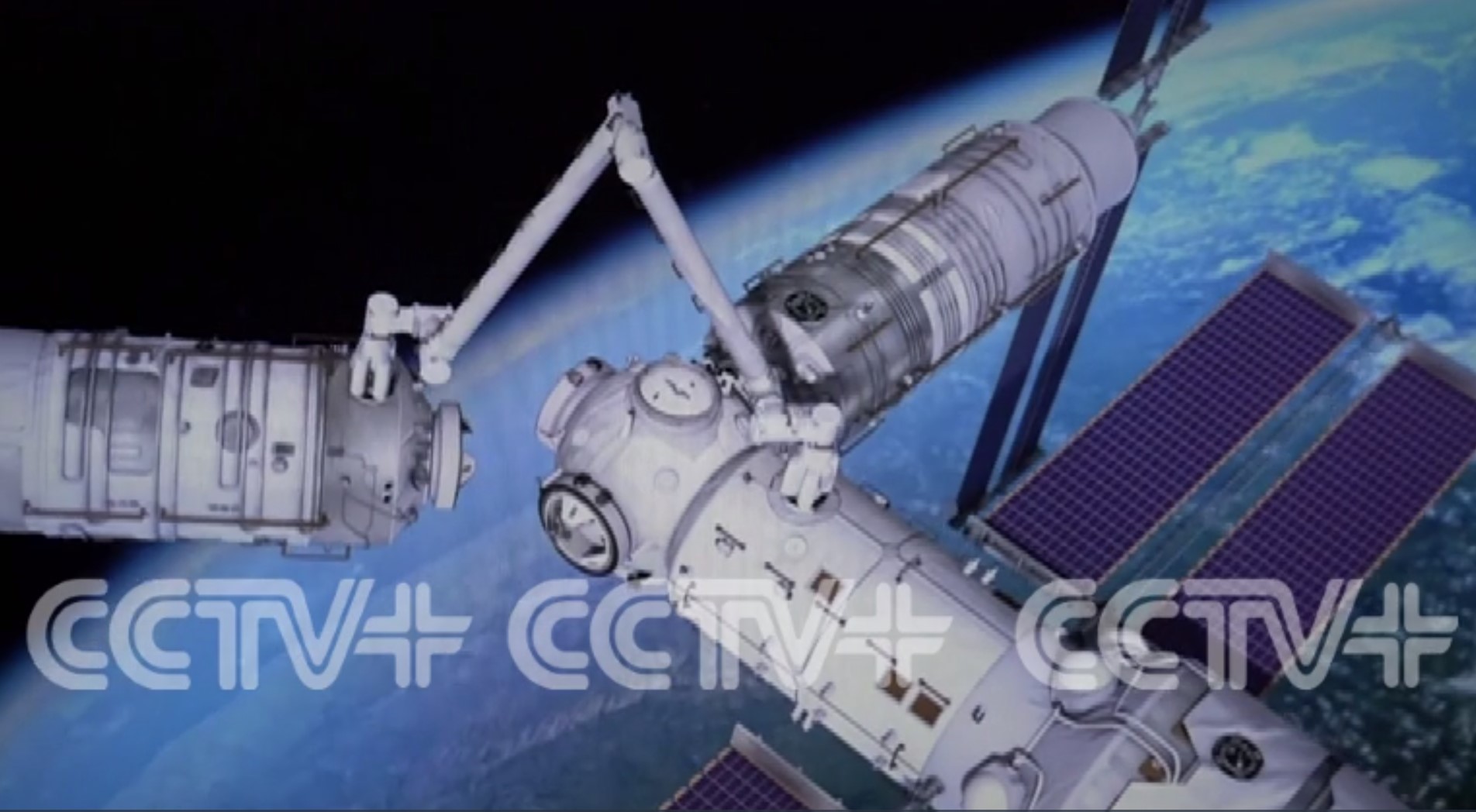
Durante la misión Shenzhou-12, los astronautas tiene programadas dos actividades y operaciones extravehiculares con el apoyo del brazo robótico, un equipo muy importante en el módulo central de la estación espacial.
El brazo robótico de la estación espacial realiza tareas importantes como ayudar a los astronautas en actividades extravehiculares, transportar carga extravehicular y verificar el estado de la cápsula espacial, todo lo cual requiere que el brazo robótico tenga la capacidad de control de precisión y fuerte movimiento libre.
El brazo robótico, con siete articulaciones y dos efectores finales, puede conectar y reenviar la interacción de información en varias posiciones y garantizar la flexibilidad y precisión de su movimiento.
“Este es uno de los componentes eléctricos de nuestro brazo robótico en el suelo, y lo que vemos aquí es que hay ocho articulaciones. Ahora tenemos identificaciones en las placas, como articulaciones de muñeca y codo. Y pueden ver que es ahora desmontado con partes separadas. Es un brazo completo en el espacio, donde estas uniones se combinan en un solo ensamblaje, realizando tareas relevantes. Pero ahora estamos en el suelo, y es difícil simular muchas condiciones de trabajo en un ambiente ingrávido. Por lo tanto, lo hemos desmontado en componentes independientes que se pueden girar, que, junto con nuestro sistema de simulación, formarán una copia exacta para verificar que el brazo robótico funciona en el espacio “, dijo Ying Peng, un importante diseñador del sistema de estaciones espaciales de China, del programa espacial tripulado con la Academia de Tecnología Espacial de China (CAST).
Los tres astronautas chinos a bordo de la nave espacial Shenzhou-12 accedieron el jueves al módulo central de la estación espacial Tianhe del país, según la Agencia Espacial Tripulada de China (CMSA).
Después de que Shenzhou-12 completara con éxito un encuentro automático rápido y un acoplamiento con el módulo Tianhe en órbita, la tripulación de Shenzhou-12 ingresó a la cápsula orbital desde la cápsula de retorno de la nave espacial.

Después de una serie de preparativos, los astronautas abrieron las escotillas del nodo y el módulo Tianhe. A las 6:48 p.m. el jueves, Nie Haisheng, Liu Boming y Tang Hongbo habían ingresado al módulo Tianhe uno por uno, lo que significa que por primera vez los chinos ingresaron a su propia estación espacial, dijo la CMSA.