
El Perseverance obtendrá imágenes adicionales del tubo de muestra antes de potencialmente completar el proceso de recolección de su primera muestra de Marte, seleccionada científicamente.
Los datos recibidos a fines del 1 de septiembre del rover Perseverance de la NASA indican que el equipo ha logrado su objetivo de extraer muestras de una roca de Marte con éxito. Las imágenes iniciales descargadas después del evento histórico muestran una muestra intacta presente en el tubo después de la extracción. Sin embargo, las imágenes adicionales tomadas después de que el brazo completó la adquisición de la muestra no fueron concluyentes debido a las malas condiciones de luz solar. Se tomará otra ronda de imágenes con mejor iluminación antes de que continúe el procesamiento de la muestra.
Obtener imágenes adicionales antes de proceder con el sellado y almacenamiento de la muestra de roca de Marte es un paso adicional que el equipo optó por incluir en función de su experiencia con el intento fallido de muestreo del rover el 5 de agosto. Aunque el equipo de la misión Perseverance confía en que la muestra esté en el tubo, imágenes en óptimas condiciones de iluminación confirmarán su presencia.

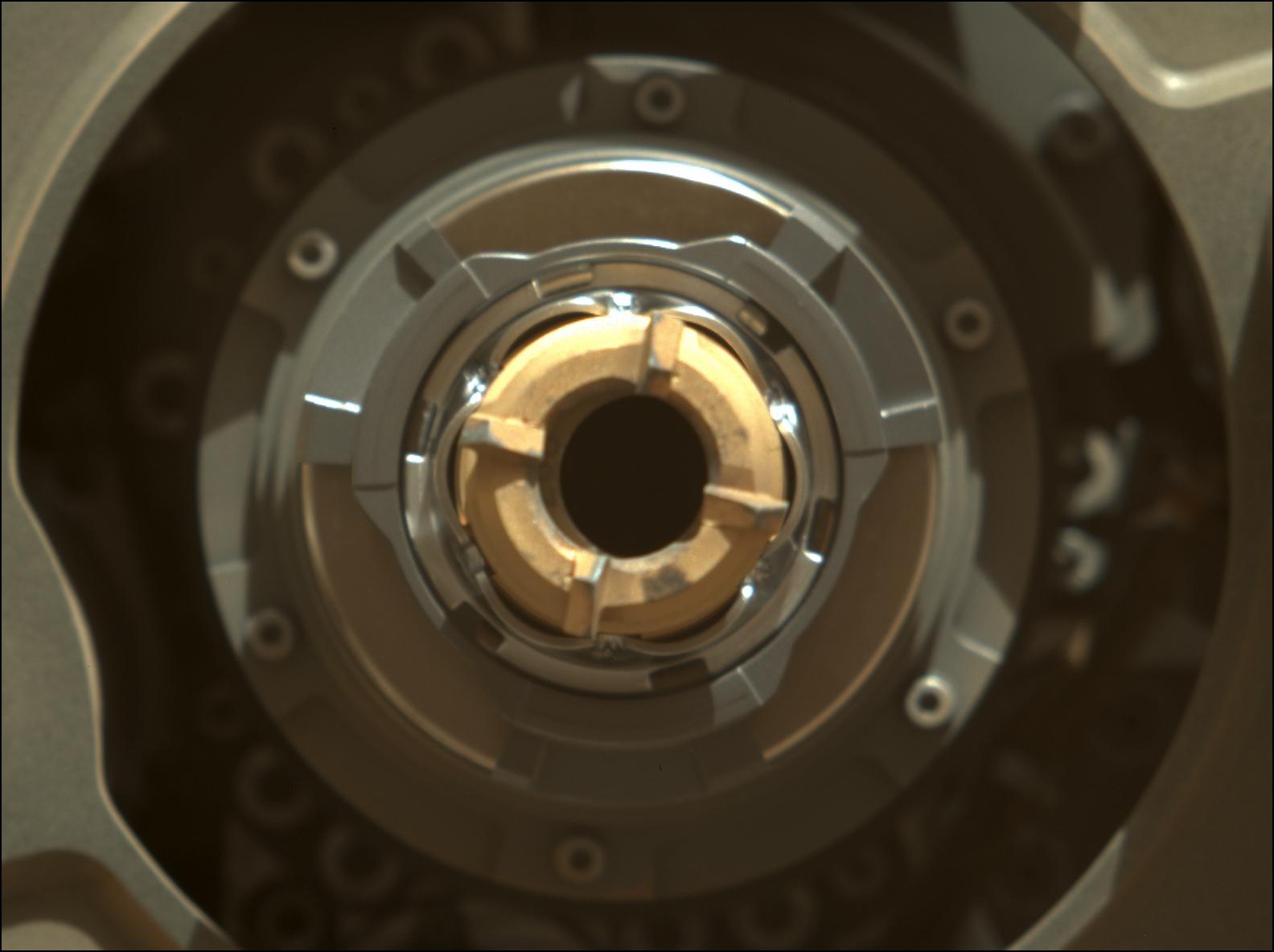
El sistema de muestreo y almacenamiento en caché de Perseverance utiliza un taladro de percusión giratorio y una broca hueca en el extremo de su brazo robótico de 2 metros de largo para extraer muestras un poco más gruesas que un lápiz. Dentro de la barrena durante la extracción de núcleos hay un tubo de muestra. Después de completar la extracción de muestras de ayer, Perseverance maniobró el extractor de muestras, la broca y el extremo abierto del tubo de muestra para obtener la imagen del instrumento Mastcam-Z del rover. El objetivo del intento de recolección de muestras fue una roca del tamaño de un maletín que pertenece a una línea de cresta que tiene más de media milla (900 metros) de largo y contiene afloramientos rocosos y cantos rodados.
El conjunto inicial de imágenes de Mastcam-Z mostró el final de una roca con núcleo dentro del tubo de muestra. Después de tomar estas imágenes, el rover inició un procedimiento llamado “percusión para ingerir”, que hace vibrar la broca y el tubo durante un segundo, cinco veces por separado. El movimiento está diseñado para limpiar el borde del tubo de muestra de cualquier material residual. La acción también puede hacer que una muestra se deslice más hacia el interior del tubo. Una vez que el rover terminó el procedimiento de percusión a ingestión, tomó un segundo conjunto de imágenes Mastcam-Z. En estas imágenes, la iluminación es deficiente y las partes internas del tubo de muestra no son visibles.
“El proyecto obtuvo su primera roca con núcleo en su haber, y eso es un logro fenomenal”, dijo Jennifer Trosper, gerente de proyectos del Laboratorio de Propulsión a Chorro de la NASA en el sur de California. “El equipo determinó una ubicación, y seleccionó y extrajo muestras de una roca viable y científicamente valiosa. Hicimos lo que vinimos a hacer. Trabajaremos a través de este pequeño problema con las condiciones de iluminación en las imágenes y seguiremos alentados de que haya una muestra en este tubo “.
Los comandos enlazados al rover más temprano hoy darán como resultado imágenes del núcleo y el tubo que se obtendrán en días posteriores, en momentos del día en Marte cuando el Sol esté en un ángulo más favorable. También se tomarán fotos después de la puesta del sol para disminuir las fuentes puntuales de luz que pueden saturar una imagen. Está previsto que las fotos se envíen hoy, 4 de septiembre, a la Tierra.
Si los resultados de estas imágenes adicionales no son concluyentes, el equipo de Perseverance aún tiene varias opciones para elegir en el futuro, incluido el uso de la sonda de volumen del Sistema de muestreo y almacenamiento en caché (ubicada dentro del chasis del rover) como confirmación final de que la muestra está en el tubo. .
La extracción de testigos del 1 de septiembre es la segunda vez que Perseverance emplea su sistema de muestreo y almacenamiento en caché desde que aterrizó en el cráter Jezero el 18 de febrero de 2021.
Más acerca del Perseverance
Un objetivo clave de la misión de Perseverance en Marte es la astrobiología, incluida la búsqueda de signos de vida microbiana antigua. El rover caracterizará la geología del planeta y el clima pasado, allanará el camino para la exploración humana del Planeta Rojo y será la primera misión en recolectar y almacenar rocas y regolitos marcianos.
Las misiones posteriores de la NASA, en cooperación con la ESA, enviarían naves espaciales a Marte para recolectar estas muestras selladas de la superficie y devolverlas a la Tierra para un análisis en profundidad.
La misión Perseverance Mars 2020 es parte del enfoque de exploración de la Luna a Marte de la NASA, que incluye misiones de Artemis a la Luna que ayudarán a prepararse para la exploración humana del Planeta Rojo.
JPL, que es administrado por la NASA por Caltech en Pasadena, California, construyó y administra las operaciones del rover Perseverance.
Para más información en Inglés sobre el Perseverance: mars.nasa.gov/mars2020/ y nasa.gov/perseverance
Traducción no oficial con fines divulgativos del artículo original en Inglés
Créditos: NASA / JPL-Caltech