Fué una semana de gran aprensión en el equipo de Mars Helicopter mientras preparábamos un gran desafío de vuelo para Ingenuity. Subimos las instrucciones para el vuelo el lunes 5 de julio a las 2:03 am PT, y esperamos con nerviosismo que llegaran los resultados de Marte esa misma mañana. El estado de ánimo en la sala de control de tierra fue de júbilo cuando supimos que Ingenuity estaba vivo y coleando después de completar un viaje que abarcaba 2,051 pies (625 metros) de terreno desafiante.
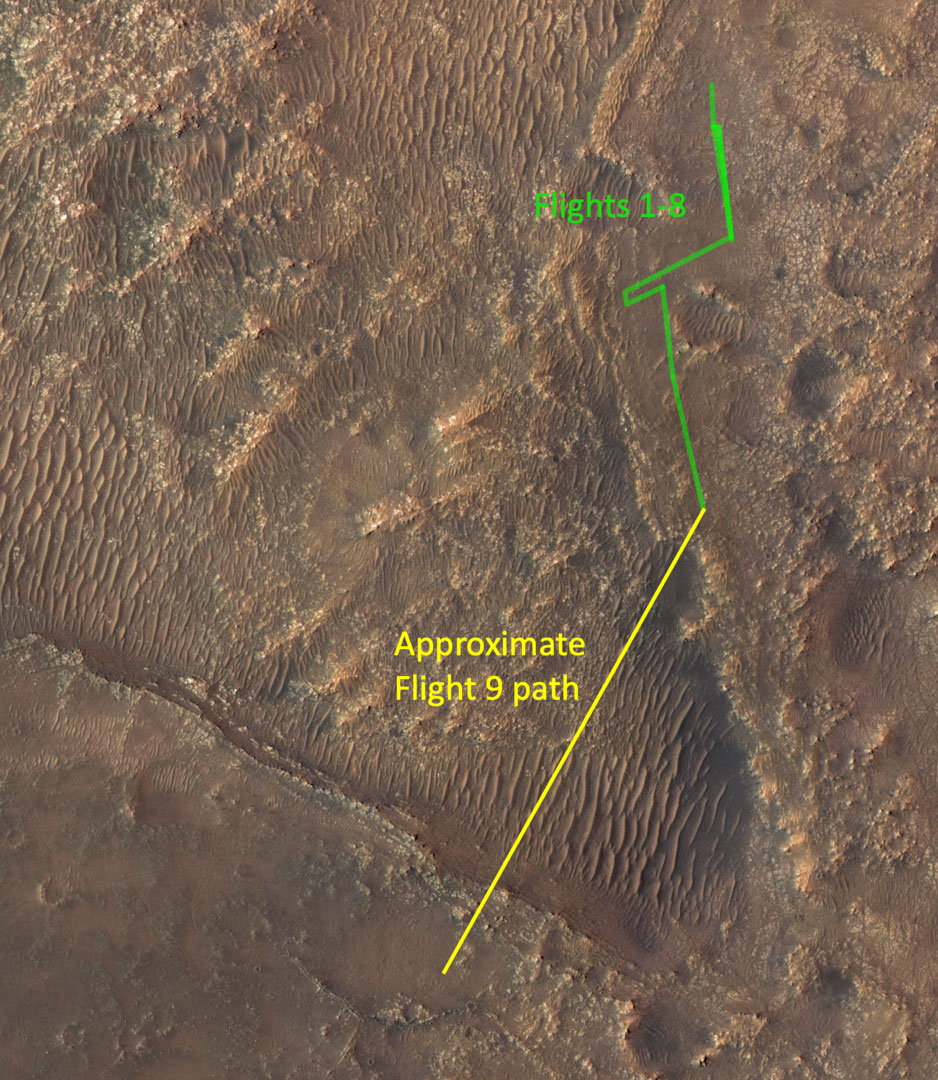
El vuelo 9 no era como los vuelos anteriores. Rompió nuestros récords de duración de vuelo y velocidad de crucero, y casi cuadruplicó la distancia volada entre dos aeródromos. Pero lo que realmente distingue al vuelo fue el terreno que Ingenuity tuvo que sortear durante sus 2 minutos y 46 segundos en el aire, un área llamada “Séítah” que sería difícil de atravesar con un vehículo terrestre como el rover Perseverance. Este vuelo también fue diseñado explícitamente para tener valor científico al proporcionar la primera vista cercana de los principales objetivos científicos que el rover no alcanzará durante bastante tiempo.
Volando con los ojos abiertos
En cada uno de sus vuelos anteriores, Ingenuity saltó de un aeródromo a otro sobre un terreno en gran parte plano. Al planificar los vuelos, incluso nos cuidamos de no sobrevolar un cráter. Comenzamos sumergiéndonos en lo que parece un cráter muy erosionado, luego continuamos descendiendo sobre un terreno inclinado y ondulado antes de ascender nuevamente para emerger en una llanura plana hacia el suroeste.
Puede parecer extraño que los detalles del terreno sean tan importantes como para un vehículo que viaja por el aire. La razón tiene que ver con el sistema de navegación de Ingenuity y para lo que fue diseñado originalmente: una breve demostración de tecnología en un sitio de prueba experimental cuidadosamente elegido.
Cuando nosotros, como seres humanos, miramos imágenes en movimiento del suelo, como las tomadas por la cámara de navegación de Ingenuity, instantáneamente comprendemos bastante bien lo que estamos viendo. Vemos rocas y ondulaciones, sombras y texturas, y los altibajos del terreno son relativamente obvios. Sin embargo, el Ingenuity no tiene la percepción ni la comprensión humanas de lo que está mirando. Ve el mundo en términos de características individuales y anónimas, esencialmente puntos que se mueven con el tiempo, e intenta interpretar el movimiento de esos puntos.
Para facilitar ese trabajo, le dimos algo de ayuda al algoritmo de navegación de Ingenuity: le dijimos que todas esas funciones están ubicadas en un terreno plano. Eso liberó al algoritmo de intentar calcular las variaciones en la altura del terreno y le permitió concentrarse en interpretar el movimiento de las características mediante los movimientos del helicóptero únicamente. Pero surgen complicaciones si luego intentamos volar sobre un terreno que no es realmente plano.
Las diferencias en la altura del terreno harán que las características se muevan a través del campo de visión a diferentes velocidades, y el algoritmo de navegación de Ingenuity todavía “asume” que el suelo debajo es plano. Hace todo lo posible para explicar el movimiento de las características mediante cambios en los movimientos del helicóptero, que pueden dar lugar a errores. Más significativamente, puede resultar en errores en el rumbo estimado, lo que hará que el helicóptero vuele en una dirección diferente a la prevista.
Preparándose para un vuelo lleno de baches
La suposición de que el suelo es plano está incorporada en el diseño del algoritmo, y no hay nada que podamos hacer al respecto al planificar los vuelos. Lo que podemos hacer es anticiparnos a los problemas que surgirán debido a este supuesto y mitigarlos en la mayor medida posible en cuanto a cómo planificamos los vuelos y los parámetros que damos al software.

Utilizamos herramientas de simulación que nos permiten estudiar en detalle el resultado probable del vuelo antes de realizarlo. Para el vuelo 9, una adaptación clave del plan de vuelo fue reducir nuestra velocidad en el punto crucial cuando nos sumergimos en el cráter. Aunque tuvo el costo de extender el tiempo de vuelo, ayudó a mitigar los primeros errores de rumbo que podrían convertirse en un gran error de posición transversal. También ajustamos algunos de los parámetros detallados del algoritmo de navegación que no habíamos tenido que tocar hasta ahora en vuelos anteriores. Y además elegimos un campo de aviación mucho más grande que en vuelos anteriores, con un radio de 164 pies (50 metros). Terminamos aterrizando aproximadamente a 47 metros (154 pies) del centro de ese aeródromo.
En la próxima semana, Ingenuity enviará imágenes en color que los científicos de Perseverance esperan estudiar. En esas imágenes se capturan afloramientos rocosos que muestran contactos entre las principales unidades geológicas en el suelo del cráter Jezero. También incluyen un sistema de fracturas que el equipo de Perseverance llama “Raised Ridges”, que los científicos del rover esperan visitar en parte para investigar si un antiguo hábitat subterráneo podría conservarse allí.
Por último, esperamos que las imágenes en color proporcionen la visión más cercana hasta ahora de “Pilot Pinnacle”, una ubicación con afloramientos que algunos miembros del equipo creen que pueden registrar algunos de los entornos de agua más profundos en el antiguo lago Jezero. Dado el apretado programa de misiones, es posible que no puedan visitar estas rocas con el rover, por lo que Ingenuity puede ofrecer la única oportunidad de estudiar estos depósitos en detalle.
Traducción no oficial con fines divulgativos del articulo original en Inglés escrito por Håvard F. Grip, piloto jefe del Ingenuity y Ken Williford, científico adjunto del proyecto del Perseverance.
Créditos: NASA / JPL-Caltech