La NASA se está preparando para enviar un VIPER a la Luna. No es el popular coche deportivo, sino un vehículo resistente que puede manejar cualquier terreno que la superficie lunar le depare. El Rover de Exploración Polar para la Investigación de Volátiles (VIPER) se puso a prueba recientemente en el Centro de Investigación Glenn en Cleveland. El prototipo se movió por pendientes de prueba y trepó sobre rocas y cráteres. También se abrió paso a través de un tipo de suelo de arenas movedizas simulado en un “tanque de fregadero”. Pasó con gran éxito y mostró a los ingenieros cómo manejará condiciones similares en la Luna.
“Queríamos ver si el rover es capaz de avanzar en un entorno de hundimiento extremo, y cuánto más lento podría conducir el VIPER o cuánta energía adicional usaría el rover debido a las difíciles condiciones del suelo”, dijo Mercedes Herreras-Martinez, gerente de riesgos de VIPER. y líder de intercambio técnico de ingeniería de sistemas de misión en Ames.

Prácticas con el VIPER en la Tierra para recorrer la Luna
El objetivo era probar la capacidad de VIPER para hacer frente a las condiciones de superficie realmente complicadas a las que se enfrentará. La construcción de la “pista de prueba” lunar simulada fue un proceso metódico, siguiendo los consejos del equipo científico VIPER. El equipo de pruebas de ingeniería seleccionó cuidadosamente los simuladores de suelo para la prueba. Escogieron rocas a mano e incluso diseñaron cuidadosamente la forma y el tamaño de los cráteres. El objetivo: imitar las características reales en la superficie del Polo Sur de la Luna. Ambos equipos tenían una gran cantidad de datos para aprovechar mientras construían la carrera de obstáculos de VIPER.

“Usando datos e imágenes de misiones lunares anteriores, creamos varias escenas aleatorias para imitar el terreno de la superficie de la Luna, con cráteres y rocas de diferentes tamaños y formas esparcidas sobre el lecho inclinado SLOPE”, dijo Kevin May. Él es el interino de ingeniería de sistemas de misión en Ames que dirigió la preparación del terreno para la prueba. “Con la ayuda del equipo científico de VIPER, que generó plantillas recortadas de perfiles de cráteres, pudimos formar características del terreno y dar forma a cráteres más precisos que nunca. Al recrear entornos realistas similares a los de la Luna, podemos tener una idea mucho mejor de cómo se desempeñará VIPER en la superficie”.
Mirando debajo del capó de VIPER
VIPER es básicamente del tamaño de un carrito de golf que viajará hasta 20 kilómetros a una velocidad máxima de 0,72 km/h. Llevará tres espectrómetros y un taladro para estudios del subsuelo, y obtendrá su energía del sol. Se espera que dure alrededor de 100 días o tres ciclos de día y noche lunares.
El bus de hardware incluye un conjunto complejo de controladores denominado “Unidad representativa de la gravitación lunar 3 (MGRU3)”. Esta es una pieza crítica de hardware en el sistema de movilidad del rover. Controla los motores que envían energía a las cuatro ruedas del rover. Las pruebas en Glenn se centraron en la capacidad de MGRU3 para maniobrar en condiciones difíciles.
“A diferencia de la mayoría de los motores de automóviles, que usan un acelerador y un freno para acelerar y desacelerar las cuatro ruedas, los controladores de motor de VIPER hacen que las ruedas del vehículo giren con la fuerza y velocidad que los conductores desean, con extrema precisión para permitir un mejor rendimiento”, dijo. ArnoRogg. Es director de pruebas e ingeniero de sistemas móviles en el Centro de Investigación Ames de la NASA en Silicon Valley, California. “Estas pruebas nos permitieron verificar el desempeño del sistema de movilidad del rover y saber que funcionará bien en la Luna”.
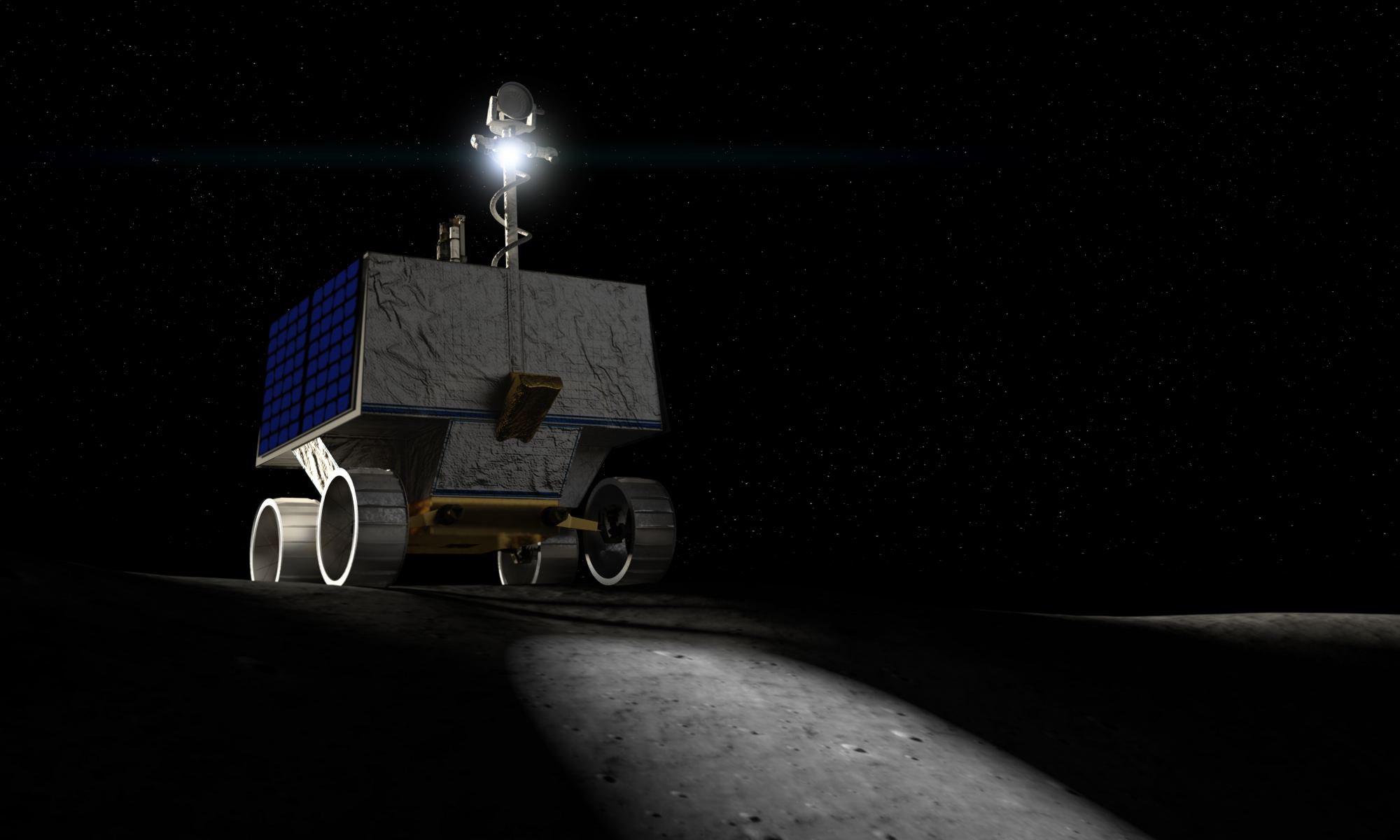
Enfrentando las condiciones lunares y haciendo investigación
VIPER está diseñado para soportar temperaturas extremas que pueden oscilar más de 260 grados centígrados durante el ciclo día/noche. Será comandado desde la Tierra, lo que significa que los operadores pueden “conducir” el rover de forma interactiva. Dado que tiene que funcionar en condiciones de poca luz y oscuridad, VIPER está equipado con un sistema de iluminación y cámara. Sus “faros” ayudarán al rover mientras explora el interior de cráteres oscuros donde el sol nunca brilla.
Este vehículo lunar todo terreno estará equipado con instrumentos científicos. Excavarán y analizarán depósitos de hielo superficiales y subterráneos a diferentes profundidades en varios ambientes de regolito (suelo). Los datos que recopila VIPER ayudarán a los científicos a crear mapas que muestren dónde existen los recursos lunares. También ayudará a localizar depósitos de hielo en la Luna. Sus instrumentos revelarán si el hielo está en forma de cristal o en moléculas unidas químicamente a otros materiales. También ayudará a los planificadores de la misión de la NASA a determinar los futuros lugares de aterrizaje y la ubicación del campamento base lunar de Artemis.
VIPER debería lanzarse a finales de 2023 y aterrizar en el Polo Sur lunar en la región de Nobile. A continuación un video de la NASA que habla sobre la misión y la región que explorará el rover.
Artículo con fines divulgativos basado en el artículo original en Inglés.
Créditos: Carolyn Collins Petersen, Universe Today
Salvo indicación contraria este trabajo está licenciado por el autor bajo la licencia International Creative Commons Attribution 4.0.